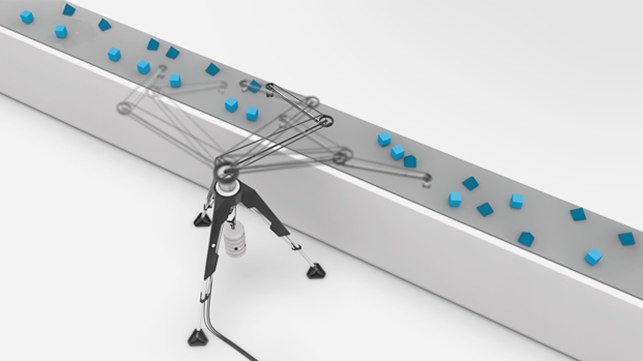



Pick & Place ist in einer Zusammenarbeit mit der Technischen Universität Berlin enstanden. Ausgangspunkt war eine neu entwickelte Kinematik, welche einen zweigliedrigen Arm mit nur einem Antrieb punktgenau zu bewegt.
Der mobile Sortierroboter macht sich das extrem geringe Gewicht dieser neuen Antriebsart zu nutze um flexibel an verschiedenen Orten einsetzbar zu sein. Diese neu gewonnene Mobilität hätte viele Vorteile, insbesondere Firmen die in Intervallen Produzieren. Sie könnten, mit einer Teilzeitlösung durch Anmietung, wirtschaftlicher Arbeiten.
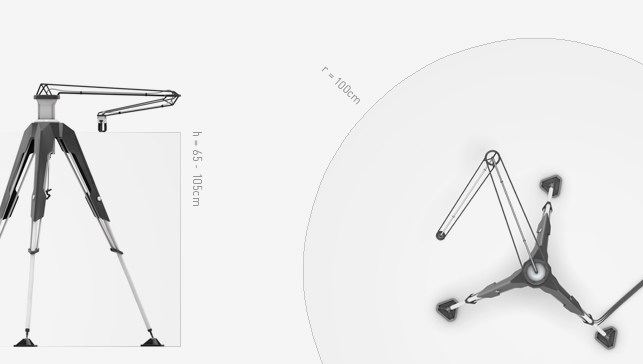
Ausgehend von einem festen Stativ setzt sich der Entwurf aus leichtbau Arm, Gewichten, Greifer und Antrieb plus Hub zusammen. Durch die Höhenverstellbarkeit sind Einsätze auf Sitz, als auch auf Stehhöhe möglich. Zur Feinjustierung dienen die Gewindestangen an den Füßen. Zusammenfahrbar auf eine Höhe von 65cm findet der Roboter im Kofferraum jedes Kombis Platz.
Auswechselbare Greifer stellen sicher, dass der Roboter möglichst viele Einsatzbereiche abdeckt.
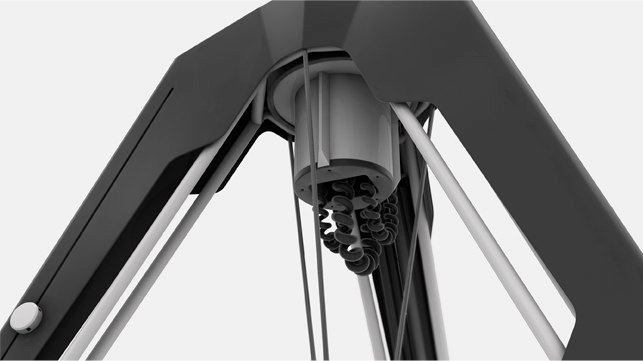
Der Druckluftschlauch zur Versorgung des Greifers wird durch Kunststoffteile auf dem Arm fixiert. Die Hauptanschlüsse der Pneumatik sind unterhalb des Antriebs zu finden. In einer Mulde versenkt, sind sie während des Transports sicher vor Stößen.
Oben zu einem Ring ausgeformt, bietet das Stativ Platz für den Antrieb, indem es ihn umschließt. Hierdurch greifen die seitlich angebrachten Beine am günstigsten Punkt um die großen Radialkräfte des Arms aufzunehmen. Für das Auflesen und Ablegen von Gegenständen hebt und senkt sich der Antrieb durch den Ring.
Sechs stapelbare Gewichte a 5 kg liefern ausreichend Masse um dem Roboter die nötige Standfestigkeit zu geben. Sie werden mittig unter dem Dreibein aufgehängt und verteilen so ihr Gewicht gleichmäßig auf jedes Bein.
Pick & Place is the result of a co-operation with the Technical University Berlin. The basis for the mobile robot concept is a newly developed kinematic system to move a gripper to a precisely accurate point with just one motor.
Due to the low weight of this kind of drive, it is now possible to mobilize pick and place robots. This newly attained mobility would have many benefits, for example for firms that have a seasonal production demand. By using this part-time solution, these companies could work in a more flexible and therefore more cost-efficient way.
Based on a rigid tripod, the robot consists of a lightweight arm, drive plus stroke, gripper and weights. With its height adjustment, Pick and Place is able to work at standing and sitting height all the same. Threaded rods at the leg ends are used for levelling adjustment. The small pack size of only 65cm height ensures that the tripod fits in any station wagon.


Betreuung // Supervision Prof. Helmut Staubach Prof. Dr.-Ing. Jörg Reiff-Stephan
Changable grippers provide a flexible application in different areas. The compressed air hose serving the grippers, is fixed on the arm with plastic parts. The main connections of the pneumatics are located below the drive. Recessed in an indentation, they are protectet from any damages during transport.
Due to its ring shape in the upper part, the tripod embraces the drive and stroke. Thus, the laterelly positioned legs can absorb radial forces of the arm in a very efficient way. To pick and place objects, the drive lifts and lowers itself through the ring in the tripod.
Six stackable weights of 5kg each offer sufficient mass to ensure stability during the operation.
They are attached the center of the tripod to evenly distribute the load to each of the legs.